Stäubli Robotics Suite 2016 Sentinel HL Dongle Clone
Stäubli Robotics Suite 2016 Test With Sentinel HL Dongle Clone
PC Software Suite for robotics application development and maintenance.
VAL 3 application editor in read-only mode:
Visualize and print VAL 3 applications
Online help for VAL 3 language
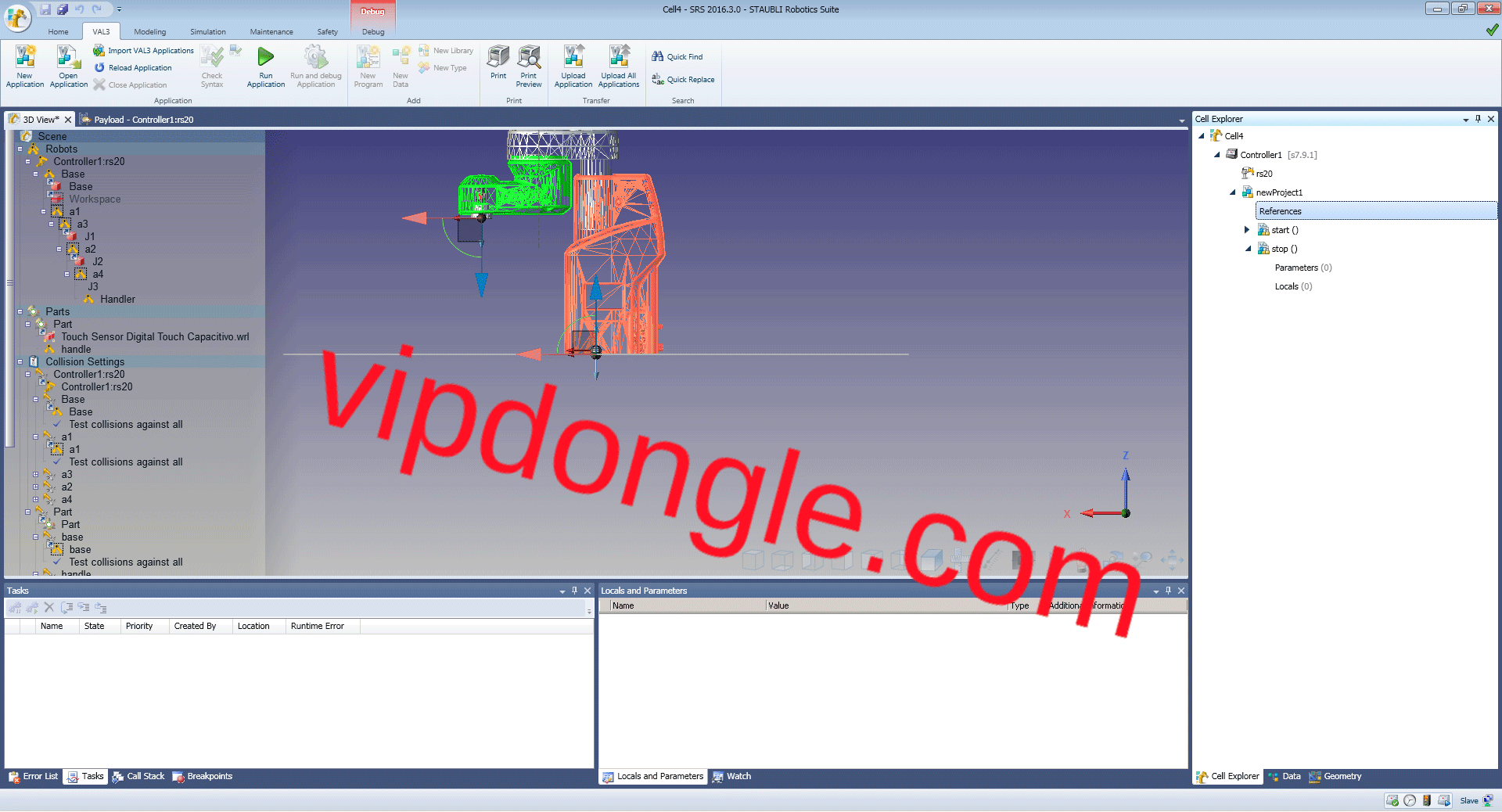
Light version of 3D scene:
Allows the visualization on the PC of the motion trajectories of the robot arms
3D visualization of all the robot arms (FAST picker, 4 axis SCARA or 6 axis)
Motion trajectories generated by emulated or real controllers
Bidirectional file transfer between the development PC and the robots:
VAL 3 applications and configuration files transfer in both directions
Full backups of the robot systems automatically organized to facilitate archiving
User profiles management:
Management of access rights to various system functionalities, such as working modes, programs, points…
Access is controlled via usernames and passwords
Allows to assign different access rights to the various possible users like operators, programmers, maintenance personnel…
Free and automatic minor upgrades:
Stäubli Robotics Suite verifies at each startup if minor upgrades are available for download
Development studio License for Stäubli Robotics Suite
This license grants access to all the functionalities required to perform realistic simulations involving one or more robots:
High end VAL 3 program editor with advanced functionalities inspired from the latest computer languages editor (such as online debugging, auto-completion of code line, code snippets, on-the-fly syntax check)
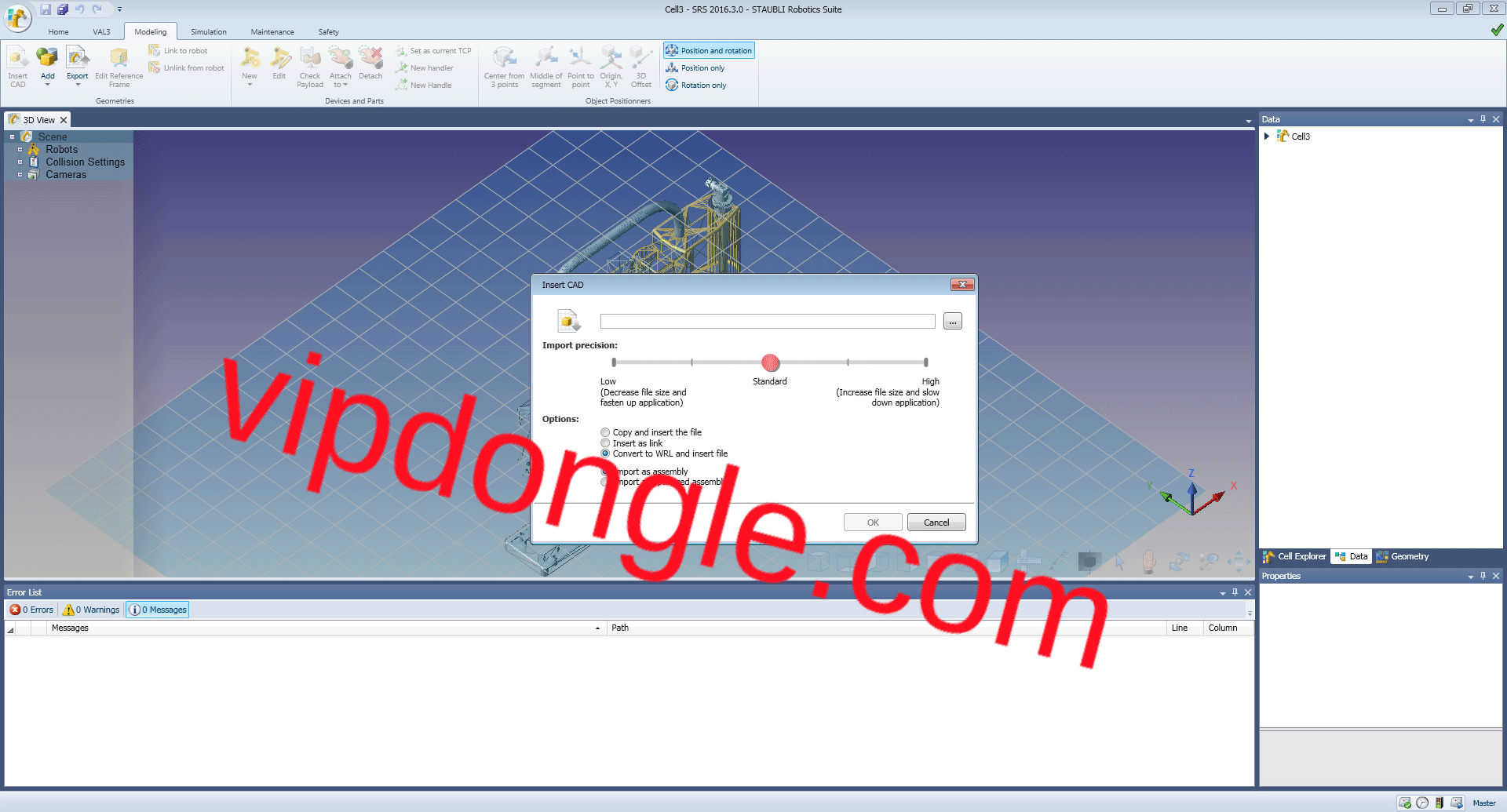
CAD models importation capabilities (STEP, IGES, STL, VRML)
3D modeling based on simple primitives (cubes, spheres, cylinders)
Deep integration of the 3D scene with the programming environment
Multi-robot simulations allowing layout analysis and realistic cycle time measurements
Creation of end-of-arm tooling, parts, and additional loads based on 3D models
Automatic calculation of load parameters (moments of inertia) to help select the best fitting robot as well as to fine tune the dynamic command laws (more realistic cycle time estimations)
The 3D robots can be connected either to emulated or real controllers
High performance collision detection: highlighting of colliding elements, definition of safety clearance zones